
Python人工智能之混合高斯模型运动目标检测详解分析
更新时间:2021年11月06日 09:50:11 作者:mind_programmonkey
运动目标检测是计算机视觉领域中的一个重要内容,其检测效果将会对目标跟踪与识别造成一定的影响,本文将介绍用Python来进行混合高斯模型运动目标检测,感兴趣的朋友快来看看吧
【人工智能项目】混合高斯模型运动目标检测
本次工作主要对视频中运动中的人或物的边缘背景进行检测。
那么走起来瓷!!!
原视频

高斯算法提取工作
import cv2
import numpy as np
# 高斯算法
class gaussian:
def __init__(self):
self.mean = np.zeros((1, 3))
self.covariance = 0
self.weight = 0;
self.Next = None
self.Previous = None
class Node:
def __init__(self):
self.pixel_s = None
self.pixel_r = None
self.no_of_components = 0
self.Next = None
class Node1:
def __init__(self):
self.gauss = None
self.no_of_comp = 0
self.Next = None
covariance0 = 11.0
def Create_gaussian(info1, info2, info3):
ptr = gaussian()
if (ptr is not None):
ptr.mean[1, 1] = info1
ptr.mean[1, 2] = info2
ptr.mean[1, 3] = info3
ptr.covariance = covariance0
ptr.weight = 0.002
ptr.Next = None
ptr.Previous = None
return ptr
def Create_Node(info1, info2, info3):
N_ptr = Node()
if (N_ptr is not None):
N_ptr.Next = None
N_ptr.no_of_components = 1
N_ptr.pixel_s = N_ptr.pixel_r = Create_gaussian(info1, info2, info3)
return N_ptr
List_node = []
def Insert_End_Node(n):
List_node.append(n)
List_gaussian = []
def Insert_End_gaussian(n):
List_gaussian.append(n)
def Delete_gaussian(n):
List_gaussian.remove(n);
class Process:
def __init__(self, alpha, firstFrame):
self.alpha = alpha
self.background = firstFrame
def get_value(self, frame):
self.background = frame * self.alpha + self.background * (1 - self.alpha)
return cv2.absdiff(self.background.astype(np.uint8), frame)
def denoise(frame):
frame = cv2.medianBlur(frame, 5)
frame = cv2.GaussianBlur(frame, (5, 5), 0)
return frame
capture = cv2.VideoCapture('1.mp4')
ret, orig_frame = capture.read( )
if ret is True:
value1 = Process(0.1, denoise(orig_frame))
run = True
else:
run = False
while (run):
ret, frame = capture.read()
value = False;
if ret is True:
cv2.imshow('input', denoise(frame))
grayscale = value1.get_value(denoise(frame))
ret, mask = cv2.threshold(grayscale, 15, 255, cv2.THRESH_BINARY)
cv2.imshow('mask', mask)
key = cv2.waitKey(10) & 0xFF
else:
break
if key == 27:
break
if value == True:
orig_frame = cv2.resize(orig_frame, (340, 260), interpolation=cv2.INTER_CUBIC)
orig_frame = cv2.cvtColor(orig_frame, cv2.COLOR_BGR2GRAY)
orig_image_row = len(orig_frame)
orig_image_col = orig_frame[0]
bin_frame = np.zeros((orig_image_row, orig_image_col))
value = []
for i in range(0, orig_image_row):
for j in range(0, orig_image_col):
N_ptr = Create_Node(orig_frame[i][0], orig_frame[i][1], orig_frame[i][2])
if N_ptr is not None:
N_ptr.pixel_s.weight = 1.0
Insert_End_Node(N_ptr)
else:
print("error")
exit(0)
nL = orig_image_row
nC = orig_image_col
dell = np.array((1, 3));
mal_dist = 0.0;
temp_cov = 0.0;
alpha = 0.002;
cT = 0.05;
cf = 0.1;
cfbar = 1.0 - cf;
alpha_bar = 1.0 - alpha;
prune = -alpha * cT;
cthr = 0.00001;
var = 0.0
muG = 0.0;
muR = 0.0;
muB = 0.0;
dR = 0.0;
dB = 0.0;
dG = 0.0;
rval = 0.0;
gval = 0.0;
bval = 0.0;
while (1):
duration3 = 0.0;
count = 0;
count1 = 0;
List_node1 = List_node;
counter = 0;
duration = cv2.getTickCount( );
for i in range(0, nL):
r_ptr = orig_frame[i]
b_ptr = bin_frame[i]
for j in range(0, nC):
sum = 0.0;
sum1 = 0.0;
close = False;
background = 0;
rval = r_ptr[0][0];
gval = r_ptr[0][0];
bval = r_ptr[0][0];
start = List_node1[counter].pixel_s;
rear = List_node1[counter].pixel_r;
ptr = start;
temp_ptr = None;
if (List_node1[counter].no_of_component > 4):
Delete_gaussian(rear);
List_node1[counter].no_of_component = List_node1[counter].no_of_component - 1;
for k in range(0, List_node1[counter].no_of_component):
weight = List_node1[counter].weight;
mult = alpha / weight;
weight = weight * alpha_bar + prune;
if (close == False):
muR = ptr.mean[0];
muG = ptr.mean[1];
muB = ptr.mean[2];
dR = rval - muR;
dG = gval - muG;
dB = bval - muB;
var = ptr.covariance;
mal_dist = (dR * dR + dG * dG + dB * dB);
if ((sum < cfbar) and (mal_dist < 16.0 * var * var)):
background = 255;
if (mal_dist < (9.0 * var * var)):
weight = weight + alpha;
if mult < 20.0 * alpha:
mult = mult;
else:
mult = 20.0 * alpha;
close = True;
ptr.mean[0] = muR + mult * dR;
ptr.mean[1] = muG + mult * dG;
ptr.mean[2] = muB + mult * dB;
temp_cov = var + mult * (mal_dist - var);
if temp_cov < 5.0:
ptr.covariance = 5.0
else:
if (temp_cov > 20.0):
ptr.covariance = 20.0
else:
ptr.covariance = temp_cov;
temp_ptr = ptr;
if (weight < -prune):
ptr = Delete_gaussian(ptr);
weight = 0;
List_node1[counter].no_of_component = List_node1[counter].no_of_component - 1;
else:
sum += weight;
ptr.weight = weight;
ptr = ptr.Next;
if (close == False):
ptr = gaussian( );
ptr.weight = alpha;
ptr.mean[0] = rval;
ptr.mean[1] = gval;
ptr.mean[2] = bval;
ptr.covariance = covariance0;
ptr.Next = None;
ptr.Previous = None;
Insert_End_gaussian(ptr);
List_gaussian.append(ptr);
temp_ptr = ptr;
List_node1[counter].no_of_components = List_node1[counter].no_of_components + 1;
ptr = start;
while (ptr != None):
ptr.weight = ptr.weight / sum;
ptr = ptr.Next;
while (temp_ptr != None and temp_ptr.Previous != None):
if (temp_ptr.weight <= temp_ptr.Previous.weight):
break;
else:
next = temp_ptr.Next;
previous = temp_ptr.Previous;
if (start == previous):
start = temp_ptr;
previous.Next = next;
temp_ptr.Previous = previous.Previous;
temp_ptr.Next = previous;
if (previous.Previous != None):
previous.Previous.Next = temp_ptr;
if (next != None):
next.Previous = previous;
else:
rear = previous;
previous.Previous = temp_ptr;
temp_ptr = temp_ptr.Previous;
List_node1[counter].pixel_s = start;
List_node1[counter].pixel_r = rear;
counter = counter + 1;
capture.release()
cv2.destroyAllWindows()
createBackgroundSubtractorMOG2
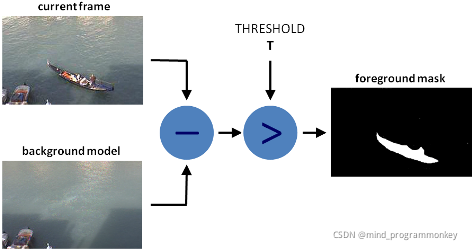
- 背景减法 (BS) 是一种常用且广泛使用的技术,用于通过使用静态相机生成前景蒙版(即,包含属于场景中运动物体的像素的二值图像)。
- 顾名思义,BS 计算前景蒙版,在当前帧和背景模型之间执行减法运算,其中包含场景的静态部分,或者更一般地说,根据观察到的场景的特征,可以将所有内容视为背景。
背景建模包括两个主要步骤:
- 后台初始化;
- 背景更新。
在第一步中,计算背景的初始模型,而在第二步中,更新该模型以适应场景中可能的变化。
import cv2
#构造VideoCapture对象
cap = cv2.VideoCapture('1.mp4')
# 创建一个背景分割器
# createBackgroundSubtractorMOG2()函数里,可以指定detectShadows的值
# detectShadows=True,表示检测阴影,反之不检测阴影。默认是true
fgbg = cv2.createBackgroundSubtractorMOG2()
while True :
ret, frame = cap.read() # 读取视频
fgmask = fgbg.apply(frame) # 背景分割
cv2.imshow('frame', fgmask) # 显示分割结果
if cv2.waitKey(100) & 0xff == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
小结
点赞评论走起来,瓷们!!!

到此这篇关于Python人工智能之混合高斯模型运动目标检测详解分析的文章就介绍到这了,更多相关Python 高斯模型运动目标检测内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!
相关文章
 这篇文章主要为大家详细介绍了Python PyQt5中拖放效果的实现原理与实现代码,文中的示例代码讲解详细,感兴趣的小伙伴可以了解一下2022-11-11
这篇文章主要为大家详细介绍了Python PyQt5中拖放效果的实现原理与实现代码,文中的示例代码讲解详细,感兴趣的小伙伴可以了解一下2022-11-11 这篇文章主要介绍了浅谈Python对内存的使用(深浅拷贝),具有一定借鉴价值,需要的朋友可以参考下2018-01-01
这篇文章主要介绍了浅谈Python对内存的使用(深浅拷贝),具有一定借鉴价值,需要的朋友可以参考下2018-01-01 这篇文章主要为大家介绍了Boston数据集预测放假及应用优缺点评估,有需要的朋友可以借鉴参考下,希望能够有所帮助,祝大家多多进步,早日升职加薪2023-10-10
这篇文章主要为大家介绍了Boston数据集预测放假及应用优缺点评估,有需要的朋友可以借鉴参考下,希望能够有所帮助,祝大家多多进步,早日升职加薪2023-10-10 freeswitch支持多种语言的业务开发,包括C/C++,java,python,js,lua,Golang等等。freeswitch在使用python做业务开发时,有俩种接入方式,一种是ESL接口,另一种是mod_python模块。本文主要介绍的是fs内部的mod_python语言支持模块,需要的朋友可以参考下面文章内容2021-09-09
freeswitch支持多种语言的业务开发,包括C/C++,java,python,js,lua,Golang等等。freeswitch在使用python做业务开发时,有俩种接入方式,一种是ESL接口,另一种是mod_python模块。本文主要介绍的是fs内部的mod_python语言支持模块,需要的朋友可以参考下面文章内容2021-09-09
django框架用户权限中的session缓存到redis中的方法
今天小编就为大家分享一篇django框架用户权限中的session缓存到redis中的方法,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧2019-08-08 这篇文章主要为大家详细介绍了如何利用Python语言实现检测照片中共有多少张人脸,文中的示例代码讲解详细,感兴趣的小伙伴可以了解一下2022-08-08
这篇文章主要为大家详细介绍了如何利用Python语言实现检测照片中共有多少张人脸,文中的示例代码讲解详细,感兴趣的小伙伴可以了解一下2022-08-08 布尔索引是一种使用 DataFrame 中数据的实际值的索引。本文将通过一些示例为大家详细讲讲Python中布尔索引的用法,需要的可以参考一下2022-08-08
布尔索引是一种使用 DataFrame 中数据的实际值的索引。本文将通过一些示例为大家详细讲讲Python中布尔索引的用法,需要的可以参考一下2022-08-08
python保存大型 .mat 数据文件报错超出 IO 限制的操作
这篇文章主要介绍了python保存大型 .mat 数据文件报错超出 IO 限制的操作,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧2021-05-05 这篇文章主要介绍了Python正则表达式查找功能,结合具体实例形式分析了Python基于正则表达式遍历查找指定格式文件的相关操作技巧,需要的朋友可以参考下2020-02-02
这篇文章主要介绍了Python正则表达式查找功能,结合具体实例形式分析了Python基于正则表达式遍历查找指定格式文件的相关操作技巧,需要的朋友可以参考下2020-02-02 这篇文章主要给大家介绍了关于Python实现小黑屋游戏的完整实例,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友们下面随着小编来一起学习学习吧2021-01-01
这篇文章主要给大家介绍了关于Python实现小黑屋游戏的完整实例,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友们下面随着小编来一起学习学习吧2021-01-01










最新评论