
Clion ROS开发环境设置技巧
在源环境中启动CLion
需要告知CLion ROS特定的环境变量。通过运行来源工作空间时,将在当前shell中检索这些变量
source ./devel/setup.bash
为CLion提供ROS环境变量的最简单方法是从同一个shell启动IDE。在获取工作空间后,您可以键入同一终端:
在CLion中打开一个ROS项目
在源环境中启动CLion后,执行以下操作之一以打开ROS项目:
- 单击文件|打开并选择ROS工作区的src目录中的CMakeLists.txt,然后选择Open as Project。
- 单击文件|来自Sources的新CMake项目,并选择工作区的src目录以从中导入项目。
该CMake的工具窗口会显示该项目加载的状态:

设置catkin工作空间的构建路径
默认情况下,CLion将构建输出放在自动创建的cmake-build-debug或cmake-build-release目录中。对于ROS开发,这意味着您将在CLion和运行的控制台中拥有两个不同的版本catkin_make。
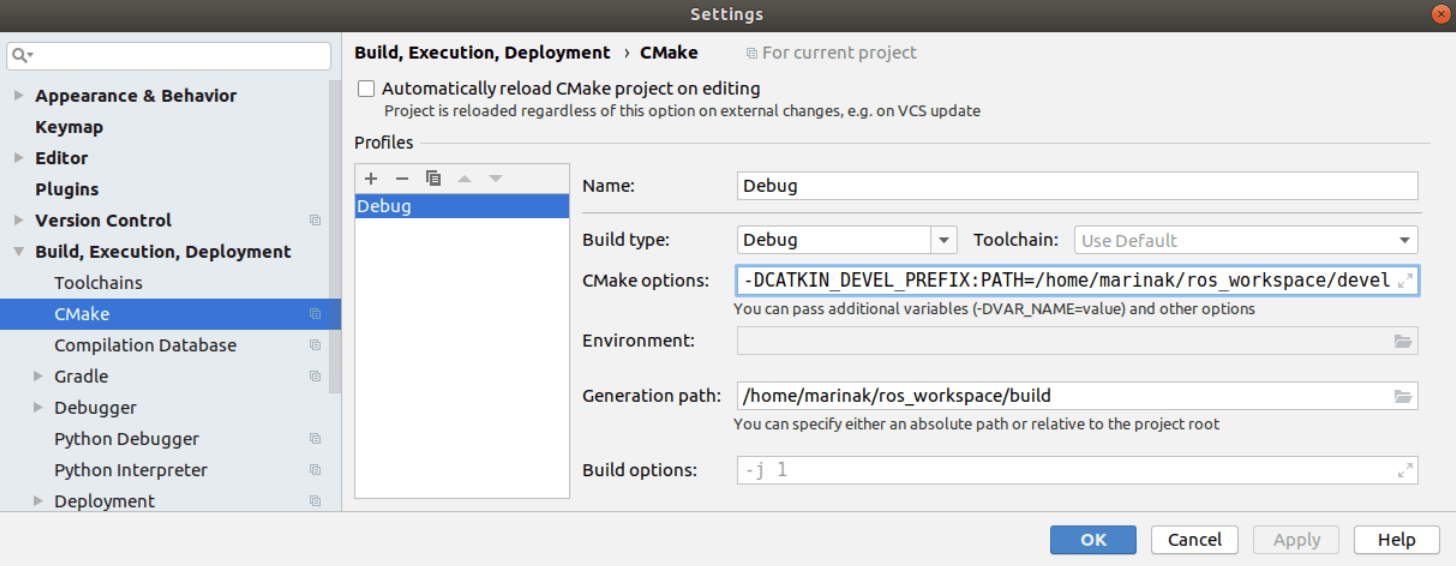
要在IDE和控制台上进行单一构建,需要将CLion构建路径设置为catkin工作区目录。为此,请转到文件|设置Ctrl+Alt+S|构建,执行,部署|CMake并更改两个字段:
- 在生成路径中,设置workspace_folder/build。
- 在CMake选项中,添加-DCATKIN_DEVEL_PREFIX:PATH=workspace_folder/devel。
使用启动文件
您可以在CLion中将ROS节点作为常规应用程序运行和调试。
启动文件无法直接执行,但您可以使用XML语法突出显示和完成编辑它们,并将调试器附加到正在运行的节点。
将调试器附加到正在运行的节点
1、从命令行运行.launch文件。例如
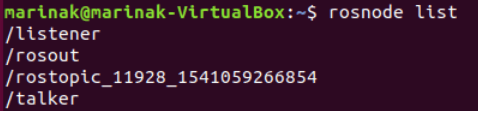
您可以通过该rosnode list命令检查当前运行的节点列表。在我们的示例中,列表将包含talker和listener:
2、呼叫运行|从主菜单附加到处理或按Ctrl+Alt+F5。
3、通过其PID或名称连接到所需节点:

示例:创建基本ROS节点,在CLion中编辑并运行它
在这个例子中,我们将创建一个简单的ROS包,编辑源代码,并从CLion运行节点。我们将在Ubuntu 18.04上使用ROS Melodic,并在ROS wiki上使用编写简单发布者和订阅者(C ++)教程的基本发布者节点。
创建一个基本的ROS包
创建和构建ROS工作区:
mkdir -p ros_workspace/srccd ros_workspace catkin_make
在工作区中,创建一个名为my_package的包:
cd src catkin_create_pkg my_package roscpp rospy std_msgs
启动CLION
来源工作区:
cd ../../../source ./devel/setup.bash
并在同一终端启动CLion
sh /opt/clion-2018.2/bin/clion.sh
在CLion中打开包作为项目
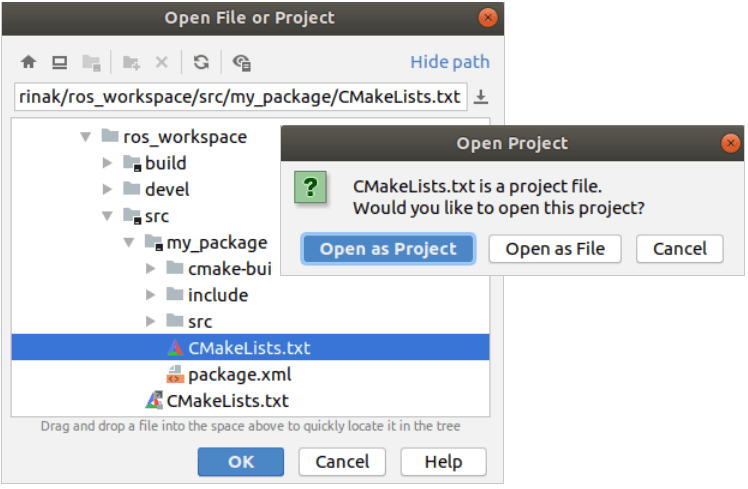
在CLion中,转到File |打开并选择位于包文件夹内的CMakeLists.txt文件,然后选择将其作为项目打开:
添加源文件并编辑CMakeLists.txt
向项目添加新的源文件:右键单击Project树中的src,选择New |C / C ++源文件并将其命名为my_package.cpp。
将整个talker.cpp文件从Publisher和Subscriber教程复制到my_package.cpp中。
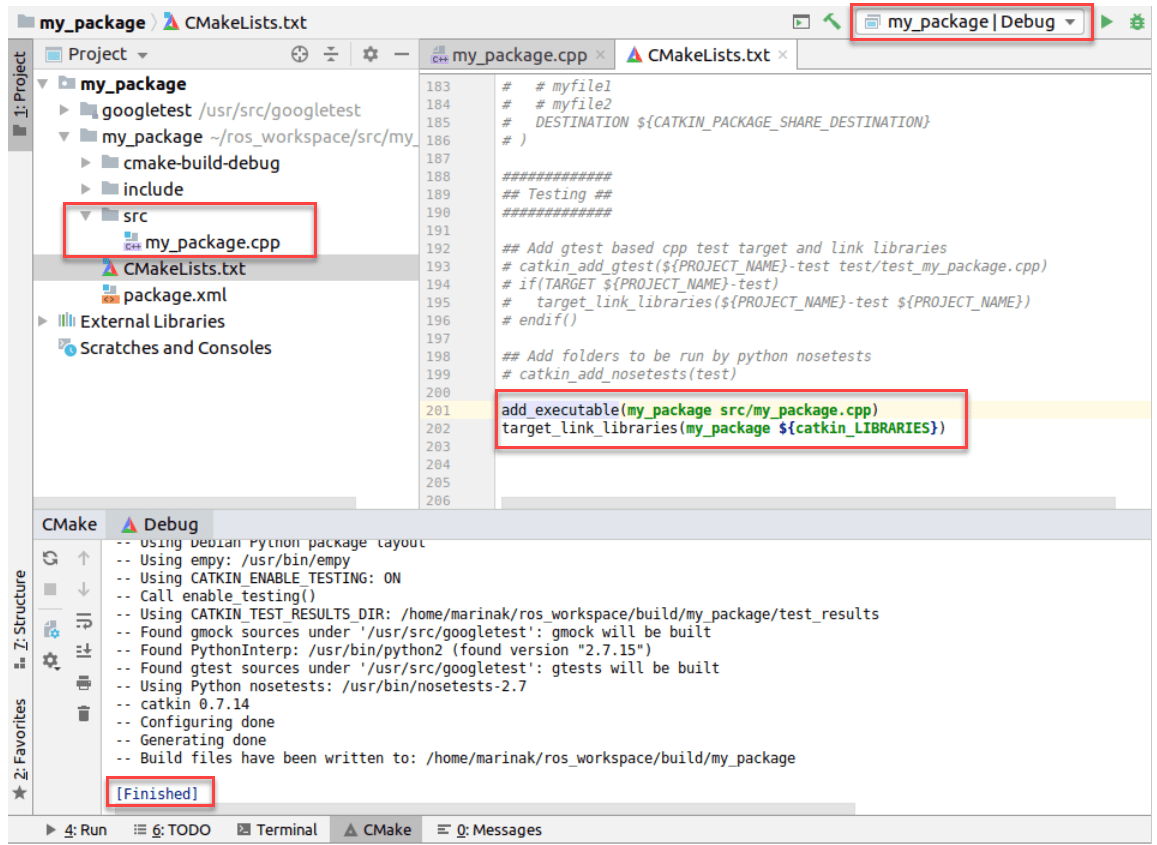
新创建的源添加到的CMakeLists.txt和链接其对应程序库:
add_executable(my_package src/my_package.cpp)
target_link_libraries(my_package ${catkin_LIBRARIES})
之后,重新加载CMake项目,并注意运行/调试配置列表中的my_package:
运行ROS节点
1、在从CLion运行节点之前,在新终端中打开ROS主站:
roscore
2、在CLion,运行 的my_package配置。运行工具窗口将显示节点输出:
的my_package配置。运行工具窗口将显示节点输出:

3、在单独的终端中,检查当前活动的ROS主题。如果我们打印消息chatter,输出将类似于我们在CLion中看到的内容:
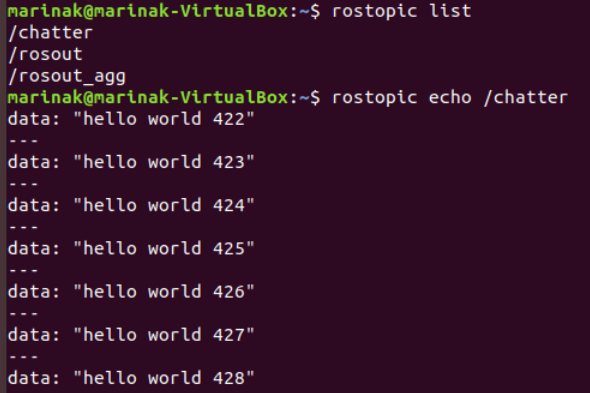
现在,如果我们 在CLion中停止应用程序,该rostopic echo /chatter命令将没有输出。
在CLion中停止应用程序,该rostopic echo /chatter命令将没有输出。
总结
到此这篇关于Clion ROS开发环境设置技巧的文章就介绍到这了,更多相关Clion ROS开发环境设置内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!
相关文章
 数据类型和Json格式,需要的朋友可以参考下。2009-10-10
数据类型和Json格式,需要的朋友可以参考下。2009-10-10 这篇文章主要介绍了详解Chrome 实用调试技巧,小编觉得挺不错的,现在分享给大家,也给大家做个参考。一起跟随小编过来看看吧2018-09-09
这篇文章主要介绍了详解Chrome 实用调试技巧,小编觉得挺不错的,现在分享给大家,也给大家做个参考。一起跟随小编过来看看吧2018-09-09
JavaScript/VBScript脚本程序调试(Wscript篇)
在日常的操作系统维护过程中,有时我们也会写一些小的脚本程序来简化系统管理工作,例如调用一些WMI函数来自动安装卸载程序之类的。2009-09-09 这篇文章主要为大家介绍了TCP窗口被填满的问题排查实践,有需要的朋友可以借鉴参考下,希望能够有所帮助祝大家多多进步,早日升职加薪2022-01-01
这篇文章主要为大家介绍了TCP窗口被填满的问题排查实践,有需要的朋友可以借鉴参考下,希望能够有所帮助祝大家多多进步,早日升职加薪2022-01-01 MASA Blazor 是一个基于 Material Design 设计语言的 Blazor 组件库,dotNET开发者只需或者甚至不需要懂得 javascript 就能开发一个企业级中后台系统,这篇文章主要介绍了使用MASA Blazor开发一个标准的查询表格页,需要的朋友可以参考下2022-04-04
MASA Blazor 是一个基于 Material Design 设计语言的 Blazor 组件库,dotNET开发者只需或者甚至不需要懂得 javascript 就能开发一个企业级中后台系统,这篇文章主要介绍了使用MASA Blazor开发一个标准的查询表格页,需要的朋友可以参考下2022-04-04 这篇文章主要为大家介绍了wireshark捕获过滤器语法使用解析,有需要的朋友可以借鉴参考下,希望能够有所帮助,祝大家多多进步早日升职加薪2022-04-04
这篇文章主要为大家介绍了wireshark捕获过滤器语法使用解析,有需要的朋友可以借鉴参考下,希望能够有所帮助,祝大家多多进步早日升职加薪2022-04-04 在vscode中使用Git可以帮助我们更方便地管理代码,进行版本控制,下面通过本文给大家介绍vscode使用git的配置教程,感兴趣的朋友一起看看吧2024-08-08
在vscode中使用Git可以帮助我们更方便地管理代码,进行版本控制,下面通过本文给大家介绍vscode使用git的配置教程,感兴趣的朋友一起看看吧2024-08-08 HTTP是一个属于应用层的面向对象的协议,由于其简捷、快速的方式,适用于分布式超媒体信息系统。本文给介绍http 协议非常经典,需要的朋友参考下吧2017-09-09
HTTP是一个属于应用层的面向对象的协议,由于其简捷、快速的方式,适用于分布式超媒体信息系统。本文给介绍http 协议非常经典,需要的朋友参考下吧2017-09-09 jQuery会死吗?我为什么不用vue写富文本,本文通过文字实例代码相结合的形式给大家介绍的非常详细,具有一定的参考借鉴价值,需要的朋友可以参考下2019-05-05
jQuery会死吗?我为什么不用vue写富文本,本文通过文字实例代码相结合的形式给大家介绍的非常详细,具有一定的参考借鉴价值,需要的朋友可以参考下2019-05-05 这篇文章主要介绍了Win10环境下编译和运行x264的详细过程,本文通过图文并茂的形式给大家介绍的非常详细,对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下2022-10-10
这篇文章主要介绍了Win10环境下编译和运行x264的详细过程,本文通过图文并茂的形式给大家介绍的非常详细,对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下2022-10-10










最新评论