
使用Claude Code高效实现图像边缘检测的实践指南
一、引言
边缘检测是计算机视觉领域最基础也最实用的技术之一。从人脸识别、自动驾驶的车道线检测,到工业产品的缺陷识别,边缘检测都是核心预处理环节。
在实际项目中,选择合适的边缘检测算法、快速验证效果、对比不同算法的表现,是常见的工程需求。本文将分享我使用 Python + OpenCV 结合 Claude Code AI 编程工具,快速实现多算法边缘检测对比工具的实践经验。
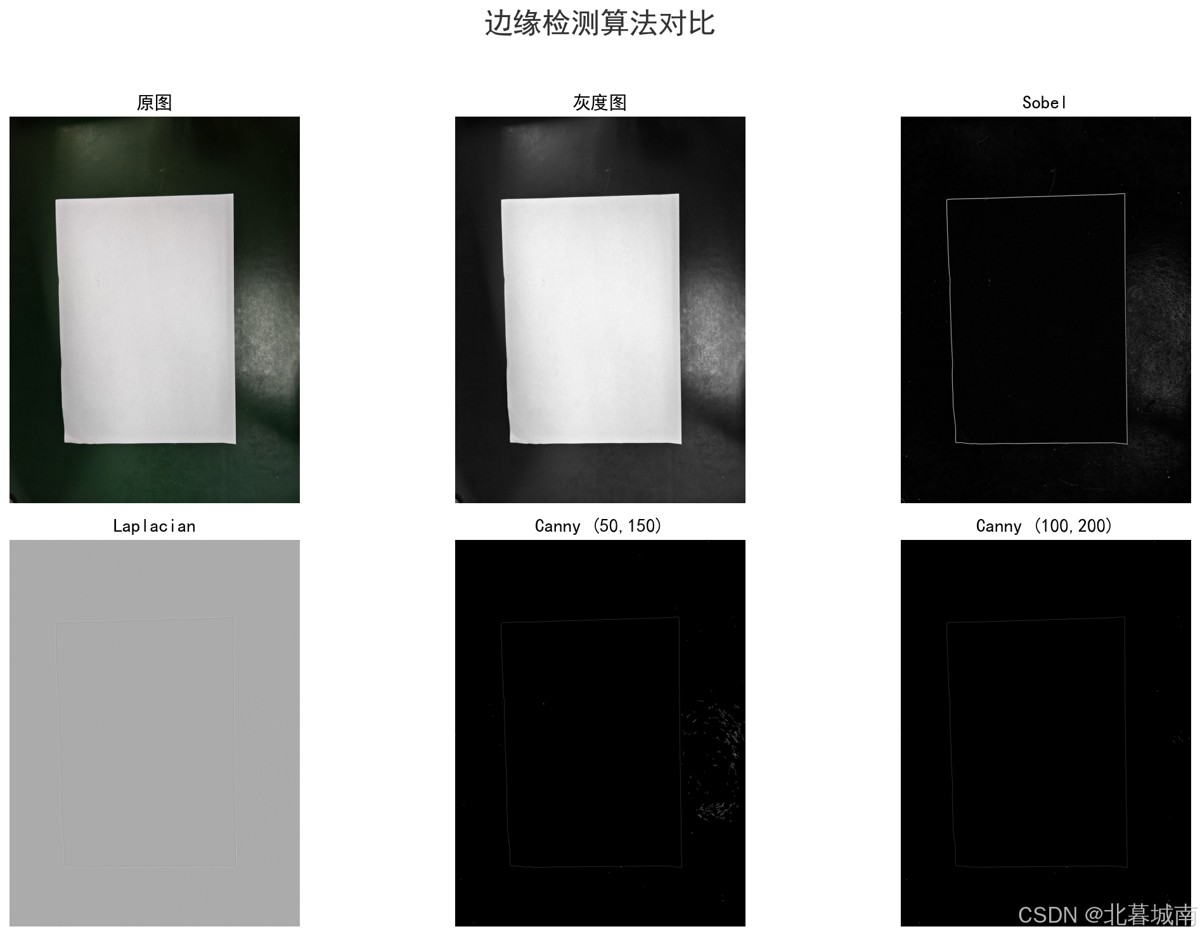
源码已置于本文附件,检测效果如图所示:
二、前置准备
2.1 环境搭建
开发环境:Python 3.12 + 虚拟环境,依赖库如下:
# 创建虚拟环境(可选) python -m venv .venv # 激活虚拟环境 .venv\Scripts\activate # 安装依赖 pip install opencv-python matplotlib numpy
这三个库的作用:
- opencv-python (cv2): 计算机视觉核心库,提供各种图像处理算法
- matplotlib: 可视化库,用于展示图片和绘制图表
- numpy: 数值计算库,图像本质上就是数字矩阵
2.2 边缘检测核心概念
什么是边缘?
边缘是图像中像素值发生剧烈变化的位置。例如从黑色物体过渡到白色背景时,灰度值从 50 突变到 200,这个交界位置就是边缘。
灰度值: 50 50 50 200 200 200 50 50
↑ ↑
左边缘 右边缘
(值从50突变到200)
为什么要做边缘检测?因为边缘包含了图像的主要结构信息——轮廓、形状、边界。找到边缘,就等于找到了物体的"骨架"。
主流算法对比
| 算法 | 原理 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|---|
| Sobel | 一阶导数,计算梯度 | 计算快,边缘完整 | 边缘较粗 | 实时性要求高的粗检 |
| Prewitt | 类似 Sobel | 简单 | 不如 Sobel 精确 | 简单场景 |
| Laplacian | 二阶导数,检测零交叉 | 能检测细边缘 | 对噪声敏感 | 降噪后的精细检测 |
| Canny | 多步骤流程 | 效果最好,边缘细且连续 | 参数需要调优 | 工业界首选 |
三、与 Claude Code 协作开发
3.1 Claude Code 是什么?
Claude Code 是 Anthropic 推出的 AI 辅助编程工具,支持自然语言需求理解、自动代码生成、实时调试等功能。与传统开发方式相比,它在快速原型开发和多方案验证场景中能显著提升效率。
3.2 开发流程复盘
以下是实际开发过程的复盘:
需求明确
开发目标是实现一个多算法边缘检测对比工具,核心需求:
- 支持主流边缘检测算法(Sobel、Laplacian、Canny)
- 可视化对比不同算法的效果
- 生成可保存的高清对比图
依赖安装
Claude Code 检测到需要 OpenCV 和 matplotlib,自动运行:
pip install opencv-python matplotlib
不需要手动查文档、记包名,AI 自动识别并安装正确的依赖。
代码生成
明确测试图片路径后,Claude Code 生成了完整的 edge_detection.py:
"""
边缘检测示例
读取图片,使用多种算法进行边缘检测,对比展示结果
"""
import cv2
import numpy as np
import matplotlib.pyplot as plt
def sobel_edge(gray):
"""Sobel 边缘检测"""
x = cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=3)
y = cv2.Sobel(gray, cv2.CV_64F, 0, 1, ksize=3)
edge = np.sqrt(x ** 2 + y ** 2)
return np.clip(edge, 0, 255).astype(np.uint8)
def canny_edge(gray, low=50, high=150):
"""Canny 边缘检测"""
return cv2.Canny(gray, low, high)
def main():
img_path = r'D:\Temp\testCheck.jpg'
img = cv2.imread(img_path)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(gray, (5, 5), sigmaX=1.5)
results = {
'原图': cv2.cvtColor(img, cv2.COLOR_BGR2RGB),
'灰度图': gray,
'Sobel': sobel_edge(blurred),
'Laplacian': cv2.Laplacian(blurred, cv2.CV_64F),
'Canny (50,150)': canny_edge(blurred, 50, 150),
'Canny (100,200)': canny_edge(blurred, 100, 200),
}
# 可视化对比展示...代码质量特点:
- 模块化设计:不同算法封装成独立函数
- 参数可配置:Canny 算法支持自定义阈值,便于实验
- 完整注释:每个函数都有清晰的文档字符串
调试优化
运行时遇到中文字体显示问题,Claude Code 自动调整配置:
# 修复前(中文显示异常) matplotlib.rcParams['font.sans-serif'] = ['DejaVu Sans'] # 修复后(指定中文字体) matplotlib.rcParams['font.sans-serif'] = ['SimHei', 'Microsoft YaHei', 'KaiTi']
结果验证
脚本运行后生成六张对比图,保存为 D:\Temp\edge_detection_result.png。从需求明确到成品验证,全程耗时约 10 分钟。
3.3 效率对比
| 开发方式 | 耗时 | 核心差异 |
|---|---|---|
| 传统方式 | 1-2 小时 | 查文档、写代码、调参数 |
| AI 辅助 | 10 分钟 | 需求描述 + 结果验证 |
AI 辅助工具的价值在于加速原型开发和方案验证,开发者可以专注于算法选择和参数调优,而非繁琐的 API 查询和代码编写。
四、代码详解
4.1 整体架构
代码采用模块化设计,主函数 main() 负责串联各步骤:
main() │ ├─ 读取图片 → 灰度化 → 高斯降噪 │ ├─ 多算法边缘检测 │ ├─ sobel_edge() │ ├─ laplacian_edge() │ └─ canny_edge() │ └─ matplotlib 2×3 可视化对比
4.2 核心代码解析
灰度转换:为什么边缘检测用灰度图?
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
边缘检测关注的是亮度变化,颜色信息不重要。灰度图是单通道(1 个数值),彩色图是三通道(RGB 3 个数值):
- 灰度图:计算量是彩色的 1/3
- 结果一样,因为边缘由亮度突变决定
- 彩色转灰度:边缘检测只关心亮度变化,转灰度能减少 2/3 的计算量
高斯模糊:降噪预处理
blurred = cv2.GaussianBlur(gray, (5, 5), sigmaX=1.5)
为什么必须先降噪?
真实图像总有噪声(传感器噪点、压缩伪影等),噪声也会产生"假边缘"。高斯模糊通过加权平均平滑图像:
- 噪声被抑制
- 真实边缘保留(因为边缘两侧差异大,模糊后仍明显)
- 提前过滤掉噪点,防止它们被误判为边缘
Sobel 算法:一阶导数计算梯度
def sobel_edge(gray):
x = cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=3) # 水平方向梯度
y = cv2.Sobel(gray, cv2.CV_64F, 0, 1, ksize=3) # 垂直方向梯度
edge = np.sqrt(x ** 2 + y ** 2) # 合成梯度幅值
return np.clip(edge, 0, 255).astype(np.uint8)
原理:用卷积核计算图像在 X 和 Y 方向的梯度:
水平边缘检测 Sobel X 核: 垂直边缘检测 Sobel Y 核: -1 0 1 -1 -2 -1 -2 0 2 0 0 0 -1 0 1 1 2 1
梯度越大 → 边缘越强。
Canny 算法:多步骤流程
def canny_edge(gray, low=50, high=150):
return cv2.Canny(gray, low, high)
Canny 是最优秀的边缘检测算法,内部执行 4 个步骤:
- 高斯降噪(抑制噪声)
- 计算梯度(Sobel 或其他)
- 非极大值抑制(只保留梯度最大的点,边缘变细)
- 双阈值筛选:
- 梯度 > high:强边缘,保留
- low < 梯度 < high:弱边缘,看是否连接强边缘
- 梯度 < low:抑制
阈值参数解读:
low=50, high=150:检测更多边缘(适合细节丰富的图)low=100, high=200:只保留强边缘(适合噪声多的图)
可视化展示
fig, axes = plt.subplots(2, 3, figsize=(15, 10))
fig.suptitle('边缘检测算法对比', fontsize=22, fontweight='bold')
for ax, (title, image) in zip(axes.flat, results.items()):
if len(image.shape) == 3:
ax.imshow(image) # 彩色图用 RGB
else:
ax.imshow(image, cmap='gray') # 灰度图用灰度色阶
ax.set_title(title, fontsize=14, fontweight='bold')
ax.axis('off')
plt.tight_layout()
plt.savefig('edge_detection_result.png', dpi=150, bbox_inches='tight')
plt.show()
细节:
cmap='gray':灰度图必须指定,否则默认用彩虹色阶(不直观)dpi=150:高清保存,适合博客配图bbox_inches='tight':自动裁剪白边
五、效果展示与分析
5.1 测试图片
测试图像:PCB/电子元器件检测图,包含清晰的线条和电路纹理,适合算法效果对比。
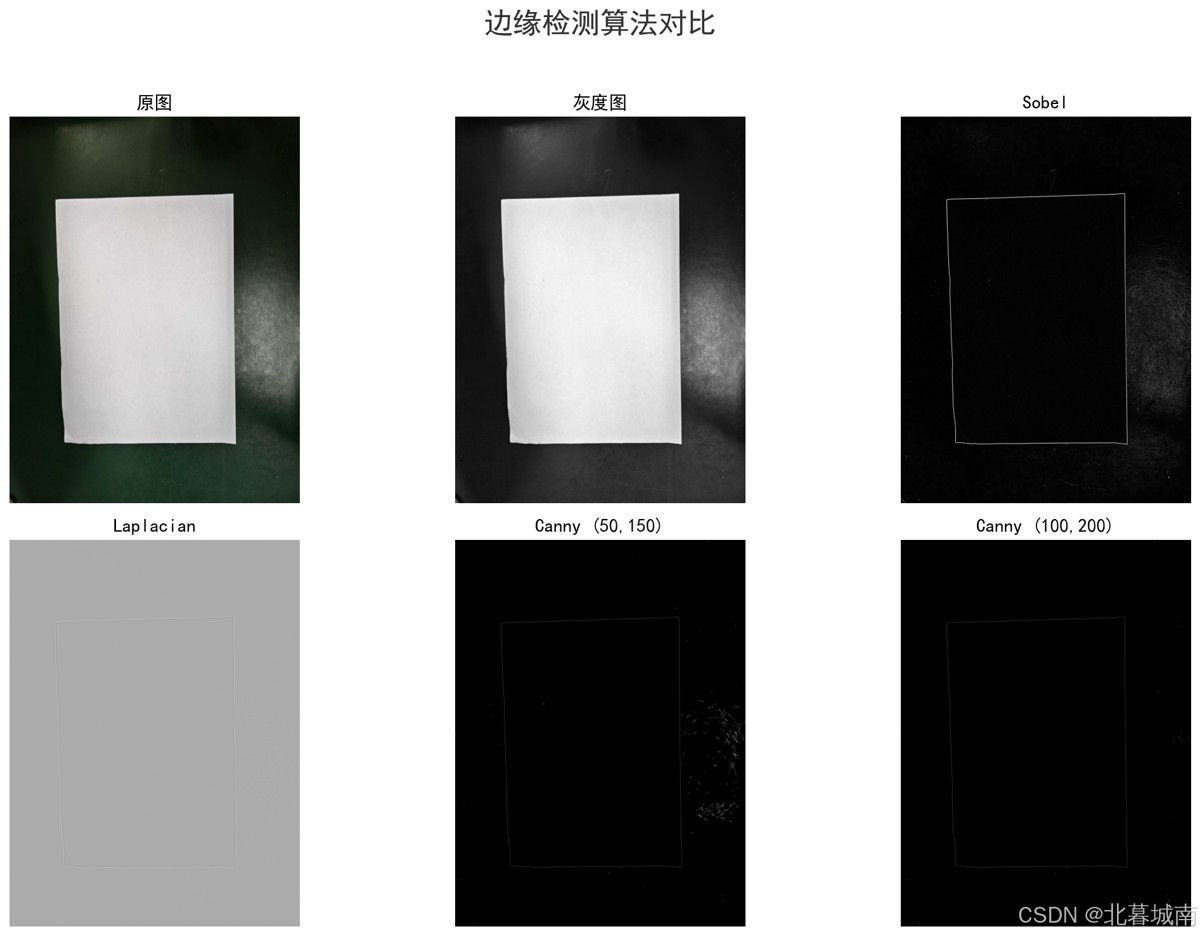
5.2 六种结果对比
| 图像 | 观察结果 |
|---|---|
| 原图 | PCB 板彩色照片,包含铜箔走线、焊盘、丝印文字 |
| 灰度图 | 亮度信息保留,颜色信息丢失(对边缘检测无影响) |
| Sobel | 边缘较粗,但完整覆盖所有走线;噪声少,适合快速粗检 |
| Laplacian | 检测到很多细边缘,但噪声明显(小亮点),容易误判 |
| Canny (50,150) | 低阈值,检测到更多细节边缘(包括细微走线) |
| Canny (100,200) | 高阈值,只保留主要轮廓(粗走线),噪声少 |
5.3 算法选择建议
基于测试结果,给出应用建议:
- 粗检快速:用 Sobel,计算量小,噪声少
- 精密检测:用 Canny,边缘细且连续,参数可调
- 对噪声敏感:慎用 Laplacian,除非提前强降噪
- 实时应用:先降分辨率(如从 1080p 降到 720p),再跑 Canny
参数调优技巧:
# 噪声多的图:提高低阈值,减少误检 edges = cv2.Canny(blurred, low=80, high=150) # 细节多的图:降低低阈值,不漏检 edges = cv2.Canny(blurred, low=30, high=100) # 高阈值差(high - low 大)→ 更少但更可靠的边缘 # 低阈值差(high - low 小)→ 更多但可能包含噪声的边缘
六、扩展思路
边缘检测只是计算机视觉的起点,掌握后可以延伸到:
6.1 实际应用场景
| 场景 | 实现方式 |
|---|---|
| 工业检测 | 边缘检测 → 轮廓提取 → 尺寸测量 → 合格判断 |
| 自动驾驶 | 边缘检测 → 霍夫变换 → 车道线拟合 |
| 医学影像 | 边缘检测 → 区域生长 → 器官分割 |
| OCR 预处理 | 边缘检测 → 文字区域定位 → 字符识别 |
6.2 进阶方向
尺寸测量:
# 找到轮廓后,计算像素距离,再根据标定系数转换为物理尺寸 contours, _ = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) cnt = contours[0] x, y, w, h = cv2.boundingRect(cnt) real_width = w * px_to_mm # 像素 → 毫米
涂胶检测(工业常见需求):
- 定义标准外框和内框(公差带)
- 检测涂胶边缘是否落在公差带内
- 统计深色区域填充度
- 扫描条码 → 确定产品型号 → 加载对应公差配置
条码识别:
import pyzbar
barcodes = pyzbar.decode(img)
for barcode in barcodes:
product_id = barcode.data.decode('utf-8')
tolerance = load_tolerance(product_id)七、总结
技术要点回顾
本次实践中涉及的边缘检测核心概念:
- 灰度化:减少计算量,边缘检测只关注亮度变化
- 高斯降噪:抑制噪声,避免假边缘
- 梯度计算:Sobel 一阶导数、Laplacian 二阶导数
- 非极大值抑制:Canny 算法的关键步骤,使边缘变细
- 双阈值筛选:平衡边缘完整性和噪声抑制
工程实践价值
多算法对比工具在工程实践中的意义:
- 快速选型:根据实际图像特性选择合适算法
- 参数调优:可视化对比不同阈值的效果
- 方案验证:在新项目启动时快速验证技术可行性
AI 辅助开发的应用场景
基于本次实践的经验,AI 辅助工具在以下场景中能显著提升效率:
- 快速原型开发:从想法到可运行代码的快速实现
- 多方案验证:快速生成不同实现方案进行对比
- 代码重构:理解现有代码并优化结构
八、资源链接
代码仓库:完整代码见 D:\Code\PycharmProjects\PythonLearn\visual\edge_detection.py
完整代码:可直接运行测试不同图像效果:
"""
边缘检测示例
读取图片,使用多种算法进行边缘检测,对比展示结果
"""
import cv2
import numpy as np
import matplotlib
import matplotlib.pyplot as plt
# 设置中文字体
matplotlib.rcParams['font.sans-serif'] = ['SimHei', 'Microsoft YaHei', 'KaiTi']
matplotlib.rcParams['axes.unicode_minus'] = False
def sobel_edge(gray):
"""Sobel 边缘检测"""
x = cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=3)
y = cv2.Sobel(gray, cv2.CV_64F, 0, 1, ksize=3)
edge = np.sqrt(x ** 2 + y ** 2)
return np.clip(edge, 0, 255).astype(np.uint8)
def laplacian_edge(gray):
"""Laplacian 边缘检测"""
return cv2.Laplacian(gray, cv2.CV_64F, ksize=3)
def canny_edge(gray, low=50, high=150):
"""Canny 边缘检测"""
return cv2.Canny(gray, low, high)
def main():
# ========== 1. 读取图片 ==========
img_path = r'D:\Temp\testCheck.jpg'
output_path = r'D:\Temp\edge_detection_result.png'
img = cv2.imread(img_path)
if img is None:
print(f"错误:无法读取图片 {img_path}")
return
h, w = img.shape[:2]
print(f"图片尺寸: {w} x {h}")
# 转灰度图(彩色转灰度:边缘检测只关心亮度变化,转灰度能减少 2/3 的计算量)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 高斯模糊降噪(提前过滤掉噪点,防止它们被误判为边缘)
blurred = cv2.GaussianBlur(gray, (5, 5), sigmaX=1.5)
# ========== 2. 多种边缘检测 ==========
results = {
'原图': cv2.cvtColor(img, cv2.COLOR_BGR2RGB),
'灰度图': gray,
'Sobel': sobel_edge(blurred),
'Laplacian': laplacian_edge(blurred),
'Canny (50,150)': canny_edge(blurred, 50, 150),
'Canny (100,200)': canny_edge(blurred, 100, 200),
}
# ========== 3. 可视化对比 ==========
fig, axes = plt.subplots(2, 3, figsize=(15, 10))
fig.suptitle('边缘检测算法对比', fontsize=22, fontweight='bold', color='#333333')
titles = list(results.keys())
images = list(results.values())
for idx, (ax, title, image) in enumerate(zip(axes.flat, titles, images)):
# 彩色图用 RGB 显示,灰度图用灰度显示
if len(image.shape) == 3:
ax.imshow(image)
else:
ax.imshow(image, cmap='gray')
ax.set_title(title, fontsize=14, fontweight='bold')
ax.axis('off')
plt.tight_layout(rect=[0, 0, 1, 0.95]) # 自动调整子图间距,防止标题重叠
plt.savefig(output_path, dpi=150, bbox_inches='tight')# 将对比结果高清保存到本地
plt.show()# 弹窗展示
print(f"结果已保存到 {output_path}")
if __name__ == '__main__':
main()
感谢阅读!
以上就是使用Claude Code高效实现图像边缘检测的实践指南的详细内容,更多关于Claude Code图像边缘检测的资料请关注脚本之家其它相关文章!
相关文章
 其实 Claude Code 内置了很多斜杠命令,输入/就能看到完整的命令列表,这些命令覆盖了会话管理、上下文控制、并行协作等方方面面,用好了能省很多事,下面小编就和大家详细2026-06-03
其实 Claude Code 内置了很多斜杠命令,输入/就能看到完整的命令列表,这些命令覆盖了会话管理、上下文控制、并行协作等方方面面,用好了能省很多事,下面小编就和大家详细2026-06-03 Claudede Hooks实战指南,涵盖三级拦截体系,两脚本开箱即用,覆盖致命、高风险、警告三级操作,通过配置settings.json灵活定制拦截策略,支持PowerShell与原生Toast通知,适用于2026-06-03
Claudede Hooks实战指南,涵盖三级拦截体系,两脚本开箱即用,覆盖致命、高风险、警告三级操作,通过配置settings.json灵活定制拦截策略,支持PowerShell与原生Toast通知,适用于2026-06-03
Claude Code接入DeepSeek V4的两种方法完整配置指南(2026最新)
Claude Code 是目前最好用的 AI 编程 Agent,但它默认只用 Anthropic 的模型,价格不便宜,本文主要介绍了Claude Code接入DeepSeek V4的两种方法,有需要的小伙伴可以了解2026-06-03 Claude Code 是目前最强大的命令行 AI 编程助手之一,但从安装、配置到日常使用,尤其是在接入国内大模型 API 时,开发者总会遇到形形色色的报错,本文以阶段为线索,系统梳2026-06-02
Claude Code 是目前最强大的命令行 AI 编程助手之一,但从安装、配置到日常使用,尤其是在接入国内大模型 API 时,开发者总会遇到形形色色的报错,本文以阶段为线索,系统梳2026-06-02- Claude Code 每次调用工具、等待输入、结束会话,都会触发对应的Hook生命周期事件,Hook 脚本除了做判断和记录,还可以把事件转发到本地 socket,让一个常驻进程处理所有状2026-06-02
 本文介绍了Claude Code多项目管理方案,该方案实现了项目规范的自动化遵守、跨会话任务共享和多项目协同开发,显著提升AI辅助编程的效率与一致性2026-06-02
本文介绍了Claude Code多项目管理方案,该方案实现了项目规范的自动化遵守、跨会话任务共享和多项目协同开发,显著提升AI辅助编程的效率与一致性2026-06-02 本教程详细介绍 Codex 与 Claude Code 在 Windows、Mac、Linux 三大主流操作系统上的安装与配置方法,本文给大家介绍的非常详细,感兴趣的朋友一起看看吧2026-06-02
本教程详细介绍 Codex 与 Claude Code 在 Windows、Mac、Linux 三大主流操作系统上的安装与配置方法,本文给大家介绍的非常详细,感兴趣的朋友一起看看吧2026-06-02
Harness实战指南之如何在Java Spring Boot项目中规范落地OpenSpec+Claude Code
Harness并非新概念,而是工程实践的系统化,通过规则、权限、审查等检查,确保AI编码可控且高效,适用于有历史包袱、需求增量改造的的JavaSpringBoot项目,本文介绍Harness实战2026-06-02 Claude Code是Anthropic推出的AI编程助手,运行在终端中,能通过自然语言帮你编写、调试和管理代码,这篇文章主要介绍了Claude Code指令超详细入门的相关资料,文中通过图文介2026-06-01
Claude Code是Anthropic推出的AI编程助手,运行在终端中,能通过自然语言帮你编写、调试和管理代码,这篇文章主要介绍了Claude Code指令超详细入门的相关资料,文中通过图文介2026-06-01 本文详细介绍了Claude配置Skills的三种方法,包括手动放置、使用skills.sh生态安装和通过官方PluginMarketplace安装,每种方法都有具体步骤和适用场景,帮助用户根据需求选择2026-05-31
本文详细介绍了Claude配置Skills的三种方法,包括手动放置、使用skills.sh生态安装和通过官方PluginMarketplace安装,每种方法都有具体步骤和适用场景,帮助用户根据需求选择2026-05-31









最新评论