
pytorch中的transforms.ToTensor和transforms.Normalize的实现
transforms.ToTensor
最近看pytorch时,遇到了对图像数据的归一化,如下图所示:

该怎么理解这串代码呢?我们一句一句的来看,先看transforms.ToTensor(),我们可以先转到官方给的定义,如下图所示:

大概的意思就是说,transforms.ToTensor()可以将PIL和numpy格式的数据从[0,255]范围转换到[0,1] ,具体做法其实就是将原始数据除以255。另外原始数据的shape是(H x W x C),通过transforms.ToTensor()后shape会变为(C x H x W)。这样说我觉得大家应该也是能理解的,这部分并不难,但想着还是用一些例子来加深大家的映像🌽🌽🌽
先导入一些包
import cv2 import numpy as np import torch from torchvision import transforms
定义一个数组模型图片,注意数组数据类型需要时np.uint8【官方图示中给出】
data = np.array([
[[1,1,1],[1,1,1],[1,1,1],[1,1,1],[1,1,1]],
[[2,2,2],[2,2,2],[2,2,2],[2,2,2],[2,2,2]],
[[3,3,3],[3,3,3],[3,3,3],[3,3,3],[3,3,3]],
[[4,4,4],[4,4,4],[4,4,4],[4,4,4],[4,4,4]],
[[5,5,5],[5,5,5],[5,5,5],[5,5,5],[5,5,5]]
],dtype='uint8')
这是可以看看data的shape,注意现在为(W H C)。

使用transforms.ToTensor()将data进行转换
data = transforms.ToTensor()(data)
这时候我们来看看data中的数据及shape。
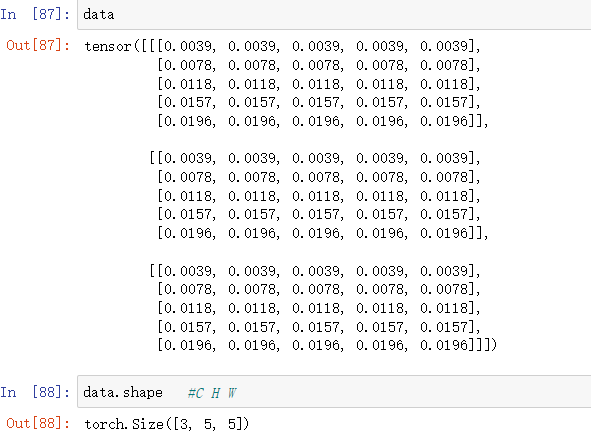
很明显,数据现在都映射到了[0, 1]之间,并且data的shape发生了变换。
**注意:不知道大家是如何理解三维数组的,这里提供我的一个方法。**🥝🥝🥝
🌼原始的data的shape为(5,5,3),则其表示有5个(5 , 3)的二维数组,即我们把最外层的[]去掉就得到了5个五行三列的数据。
🌼同样的,变换后data的shape为(3,5,5),则其表示有3个(5 , 5)的二维数组,即我们把最外层的[]去掉就得到了3个五行五列的数据。
transforms.Normalize🌵
相信通过前面的叙述大家应该对transforms.ToTensor有了一定的了解,下面将来说说这个transforms.Normalize🍹🍹🍹同样的,我们先给出官方的定义,如下图所示:
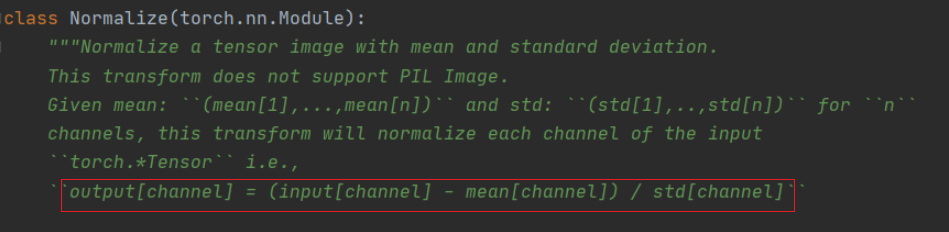
可以看到这个函数的输出output[channel] = (input[channel] - mean[channel]) / std[channel]。这里[channel]的意思是指对特征图的每个通道都进行这样的操作。【mean为均值,std为标准差】接下来我们看第一张图片中的代码,即

这里的第一个参数(0.5,0.5,0.5)表示每个通道的均值都是0.5,第二个参数(0.5,0.5,0.5)表示每个通道的方差都为0.5。【因为图像一般是三个通道,所以这里的向量都是1x3的🍵🍵🍵】有了这两个参数后,当我们传入一个图像时,就会按照上面的公式对图像进行变换。【注意:这里说图像其实也不够准确,因为这个函数传入的格式不能为PIL Image,我们应该先将其转换为Tensor格式】
说了这么多,那么这个函数到底有什么用呢?我们通过前面的ToTensor已经将数据归一化到了0-1之间,现在又接上了一个Normalize函数有什么用呢?其实Normalize函数做的是将数据变换到了[-1,1]之间。之前的数据为0-1,当取0时,output =(0 - 0.5)/ 0.5 = -1;当取1时,output =(1 - 0.5)/ 0.5 = 1。这样就把数据统一到了[-1,1]之间了🌱🌱🌱那么问题又来了,数据统一到[-1,1]有什么好处呢?数据如果分布在(0,1)之间,可能实际的bias,就是神经网络的输入b会比较大,而模型初始化时b=0的,这样会导致神经网络收敛比较慢,经过Normalize后,可以加快模型的收敛速度。【这句话是再网络上找到最多的解释,自己也不确定其正确性】
读到这里大家是不是以为就完了呢?这里还想和大家唠上一唠🍓🍓🍓上面的两个参数(0.5,0.5,0.5)是怎么得来的呢?这是根据数据集中的数据计算出的均值和标准差,所以往往不同的数据集这两个值是不同的🍏🍏🍏这里再举一个例子帮助大家理解其计算过程。同样采用上文例子中提到的数据。
上文已经得到了经ToTensor转换后的数据,现需要求出该数据每个通道的mean和std。【这一部分建议大家自己运行看看每一步的结果🌵🌵🌵】
# 需要对数据进行扩维,增加batch维度 data = torch.unsqueeze(data,0) #在pytorch中一般都是(batch,C,H,W) nb_samples = 0. #创建3维的空列表 channel_mean = torch.zeros(3) channel_std = torch.zeros(3) N, C, H, W = data.shape[:4] data = data.view(N, C, -1) #将数据的H,W合并 #展平后,w,h属于第2维度,对他们求平均,sum(0)为将同一纬度的数据累加 channel_mean += data.mean(2).sum(0) #展平后,w,h属于第2维度,对他们求标准差,sum(0)为将同一纬度的数据累加 channel_std += data.std(2).sum(0) #获取所有batch的数据,这里为1 nb_samples += N #获取同一batch的均值和标准差 channel_mean /= nb_samples channel_std /= nb_samples print(channel_mean, channel_std) #结果为tensor([0.0118, 0.0118, 0.0118]) tensor([0.0057, 0.0057, 0.0057])
将上述得到的mean和std带入公式,计算输出。
for i in range(3):
data[i] = (data[i] - channel_mean[i]) / channel_std[i]
print(data)
输出结果:

从结果可以看出,我们计算的mean和std并不是0.5,且最后的结果也没有在[-1,1]之间。
最后我们再来看一个有意思的例子,我们得到了最终的结果,要是我们想要变回去怎么办,其实很简单啦,就是一个逆运算,即input = std*output + mean,然后再乘上255就可以得到原始的结果了。很多人获取吐槽了,这也叫有趣!!??哈哈哈这里我想说的是另外的一个事,如果我们对一张图像进行了归一化,这时候你用归一化后的数据显示这张图像的时候,会发现同样会是原图。
参考链接1:https://zhuanlan.zhihu.com/p/414242338
参考链接2:https://blog.csdn.net/peacefairy/article/details/108020179
到此这篇关于pytorch中的transforms.ToTensor和transforms.Normalize的实现的文章就介绍到这了,更多相关pytorch transforms.ToTensor和transforms.Normalize内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!
相关文章
 这篇文章主要为大家介绍了go语言beego框架jwt身份认证实现示例,有需要的朋友可以借鉴参考下,希望能够有所帮助,祝大家多多进步早日升职加薪2022-04-04
这篇文章主要为大家介绍了go语言beego框架jwt身份认证实现示例,有需要的朋友可以借鉴参考下,希望能够有所帮助,祝大家多多进步早日升职加薪2022-04-04
Go实现List、Set、Stack、Deque等数据结构的操作方法
Go语言团队的一个核心目标是保持语言的简单性,他们认为,如果一个功能可以用简单的组合来实现,那就没有必要把它放进标准库里,本文给大家介绍Go实现List、Set、Stack、Deque等数据结构的操作方法,感兴趣的朋友跟随小编一起看看吧2024-12-12 这篇文章主要介绍了Golang中的四个括号,本文通过实例代码给大家介绍的非常详细,通过实例代码补充介绍了有效的括号golang实现,需要的朋友可以参考下2024-03-03
这篇文章主要介绍了Golang中的四个括号,本文通过实例代码给大家介绍的非常详细,通过实例代码补充介绍了有效的括号golang实现,需要的朋友可以参考下2024-03-03 这篇文章介绍了Go语言中DateTime的用法,文中通过示例代码介绍的非常详细。对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下2022-07-07
这篇文章介绍了Go语言中DateTime的用法,文中通过示例代码介绍的非常详细。对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下2022-07-07 这篇文章主要介绍了Go defer 原理和源码剖析,需要的朋友可以参考下2021-11-11
这篇文章主要介绍了Go defer 原理和源码剖析,需要的朋友可以参考下2021-11-11 本文详细介绍了在Go语言中进行文件操作的方法,包括文件的创建、打开、读取、写入和关闭等,解析了使用os、bufio和io包进行高效文件操作的技巧,并提供了错误处理与性能优化的建议,以帮助开发者有效管理文件资源并提升应用性能,需要的朋友可以参考下2024-11-11
本文详细介绍了在Go语言中进行文件操作的方法,包括文件的创建、打开、读取、写入和关闭等,解析了使用os、bufio和io包进行高效文件操作的技巧,并提供了错误处理与性能优化的建议,以帮助开发者有效管理文件资源并提升应用性能,需要的朋友可以参考下2024-11-11 在日常工作中每一名开发者,不管是前端还是后端,都经常使用 JSON,下面这篇文章主要给大家介绍了关于golang解析json数据的4种方法,文中通过实例代码介绍的非常详细,需要的朋友可以参考下2023-06-06
在日常工作中每一名开发者,不管是前端还是后端,都经常使用 JSON,下面这篇文章主要给大家介绍了关于golang解析json数据的4种方法,文中通过实例代码介绍的非常详细,需要的朋友可以参考下2023-06-06 Golang采用了CSP(Communicating Sequential Processes,通信顺序进程)并发模型,通过goroutine和channel提供了一种更为简洁和安全的并发编程方式,本文将详细介绍Golang的CSP并发模型及其使用方法,感兴趣的朋友一起看看吧2025-01-01
Golang采用了CSP(Communicating Sequential Processes,通信顺序进程)并发模型,通过goroutine和channel提供了一种更为简洁和安全的并发编程方式,本文将详细介绍Golang的CSP并发模型及其使用方法,感兴趣的朋友一起看看吧2025-01-01 零拷贝是相对于用户态来讲的,即数据在用户态不发生任何拷贝,那么零拷贝的原理是什么,又是如何实现的呢,下面小编就来和大家详细聊聊吧2023-08-08
零拷贝是相对于用户态来讲的,即数据在用户态不发生任何拷贝,那么零拷贝的原理是什么,又是如何实现的呢,下面小编就来和大家详细聊聊吧2023-08-08 这篇文章主要为大家详细介绍了Go官方库x中提供的扩展并发原语 semaphore,译为“信号量”,文中介绍了它的原理与使用,需要的可以了解下2025-02-02
这篇文章主要为大家详细介绍了Go官方库x中提供的扩展并发原语 semaphore,译为“信号量”,文中介绍了它的原理与使用,需要的可以了解下2025-02-02










最新评论